DistanceMap2d
Computes the distance map of objects in a two-dimensional binary image.
Access to parameter description
A distance map, also known as distance transform, is a representation of an image where each pixel value corresponds to its distance to the nearest boundary pixel in a given metric.
Two metrics are commonly used:
In the case of the Chessboard metric, the distance is given by: $$ I=d_ C(x,\delta(X)) $$ Where: $$ d_C((i,j),(h,k))=max(|h-i|,|k-j|) $$ The weight used for each neighbor configuration can be user defined. Some optimizations are automatically performed when the weights set correspond to a Chamfer or a Chessboard distance map.
Distance maps are computed on binary images either on object pixels (foreground) or on the background.
The output image can have either a 16-bit signed integer or a 32-bit float type.
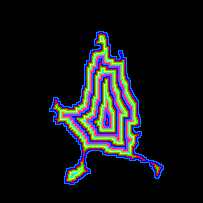
Figure 1. Output image for chessboard distance transform in inside mode
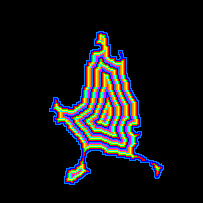
Figure 2. Output image for chamfer distance transform in inside mode
Note: This algorithm does not take into account the input image calibration. The output values are systematically indicating distance in pixel units.
See also
Access to parameter description
A distance map, also known as distance transform, is a representation of an image where each pixel value corresponds to its distance to the nearest boundary pixel in a given metric.
Two metrics are commonly used:
- The Chessboard distance, also known as Chebyshev distance, where all neighbor pixels are considered as a same distance of 1 from a given pixel.
- The Chamfer distance where edge neighbors are considered as a distance of 1 and corner neighbors are considered with a $\sqrt{2}$ weight in order to better approximate a Euclidean distance.
In the case of the Chessboard metric, the distance is given by: $$ I=d_ C(x,\delta(X)) $$ Where: $$ d_C((i,j),(h,k))=max(|h-i|,|k-j|) $$ The weight used for each neighbor configuration can be user defined. Some optimizations are automatically performed when the weights set correspond to a Chamfer or a Chessboard distance map.
Distance maps are computed on binary images either on object pixels (foreground) or on the background.
The output image can have either a 16-bit signed integer or a 32-bit float type.
Figure 1. Output image for chessboard distance transform in inside mode
Figure 2. Output image for chamfer distance transform in inside mode
Note: This algorithm does not take into account the input image calibration. The output values are systematically indicating distance in pixel units.
See also
Function Syntax
This function returns the outputMapImage output parameter.
// Function prototype.
std::shared_ptr< iolink::ImageView >
distanceMap2d( std::shared_ptr< iolink::ImageView > inputBinaryImage,
DistanceMap2d::MappingMode mappingMode,
DistanceMap2d::BorderCondition borderCondition,
double edgeDistance,
double cornerDistance,
DistanceMap2d::OutputType outputType,
std::shared_ptr< iolink::ImageView > outputMapImage = NULL );
This function returns the outputMapImage output parameter.
// Function prototype.
distance_map_2d( input_binary_image,
mapping_mode = DistanceMap2d.MappingMode.INSIDE,
border_condition = DistanceMap2d.BorderCondition.MIRROR,
edge_distance = 1,
corner_distance = 1.41421,
output_type = DistanceMap2d.OutputType.SIGNED_INTEGER_16_BIT,
output_map_image = None )
This function returns the outputMapImage output parameter.
// Function prototype.
public static IOLink.ImageView
DistanceMap2d( IOLink.ImageView inputBinaryImage,
DistanceMap2d.MappingMode mappingMode = ImageDev.DistanceMap2d.MappingMode.INSIDE,
DistanceMap2d.BorderCondition borderCondition = ImageDev.DistanceMap2d.BorderCondition.MIRROR,
double edgeDistance = 1,
double cornerDistance = 1.41421,
DistanceMap2d.OutputType outputType = ImageDev.DistanceMap2d.OutputType.SIGNED_INTEGER_16_BIT,
IOLink.ImageView outputMapImage = null );
Class Syntax
Parameters
| Class Name | DistanceMap2d |
|---|
| Parameter Name | Description | Type | Supported Values | Default Value | |||||
|---|---|---|---|---|---|---|---|---|---|
 |
inputBinaryImage |
The binary input image.
Background is represented by zero values while objects are represented by one values. |
Image | Binary | nullptr | ||||
|
mappingMode |
The mode defining where the distance field is computed.
|
Enumeration | INSIDE | |||||
|
borderCondition |
The mode defining the border conditions.
|
Enumeration | MIRROR | |||||
|
edgeDistance |
The distance weight between 2 pixels having an edge connection.
The value must be strictly positive. |
Float64 | >0 | 1 | ||||
|
cornerDistance |
The distance weight between 2 pixels having a corner connection.
The value must be greater than or equal to edgeDistance. |
Float64 | Any value | 1.41421 | ||||
|
outputType |
The output image type to provide.
|
Enumeration | SIGNED_INTEGER_16_BIT | |||||
 |
outputMapImage |
The output distance map image.
The distance map of the shape represented by the input image. Each voxel is assigned to a value corresponding to the distance to the nearest object boundary. Its dimensions are forced to the same values as the input. Its data type is defined by the outputType parameter. |
Image | nullptr | |||||
Object Examples
auto polystyrene_sep = readVipImage( std::string( IMAGEDEVDATA_IMAGES_FOLDER ) + "polystyrene_sep.vip" ); DistanceMap2d distanceMap2dAlgo; distanceMap2dAlgo.setInputBinaryImage( polystyrene_sep ); distanceMap2dAlgo.setMappingMode( DistanceMap2d::MappingMode::INSIDE ); distanceMap2dAlgo.setBorderCondition( DistanceMap2d::BorderCondition::MIRROR ); distanceMap2dAlgo.setEdgeDistance( 1 ); distanceMap2dAlgo.setCornerDistance( 1.4142135623730951 ); distanceMap2dAlgo.setOutputType( DistanceMap2d::OutputType::SIGNED_INTEGER_16_BIT ); distanceMap2dAlgo.execute(); std::cout << "outputMapImage:" << distanceMap2dAlgo.outputMapImage()->toString();
polystyrene_sep = imagedev.read_vip_image(imagedev_data.get_image_path("polystyrene_sep.vip"))
distance_map_2d_algo = imagedev.DistanceMap2d()
distance_map_2d_algo.input_binary_image = polystyrene_sep
distance_map_2d_algo.mapping_mode = imagedev.DistanceMap2d.INSIDE
distance_map_2d_algo.border_condition = imagedev.DistanceMap2d.MIRROR
distance_map_2d_algo.edge_distance = 1
distance_map_2d_algo.corner_distance = 1.4142135623730951
distance_map_2d_algo.output_type = imagedev.DistanceMap2d.SIGNED_INTEGER_16_BIT
distance_map_2d_algo.execute()
print( "output_map_image:", str( distance_map_2d_algo.output_map_image ) );
ImageView polystyrene_sep = Data.ReadVipImage( @"Data/images/polystyrene_sep.vip" );
DistanceMap2d distanceMap2dAlgo = new DistanceMap2d
{
inputBinaryImage = polystyrene_sep,
mappingMode = DistanceMap2d.MappingMode.INSIDE,
borderCondition = DistanceMap2d.BorderCondition.MIRROR,
edgeDistance = 1,
cornerDistance = 1.4142135623730951,
outputType = DistanceMap2d.OutputType.SIGNED_INTEGER_16_BIT
};
distanceMap2dAlgo.Execute();
Console.WriteLine( "outputMapImage:" + distanceMap2dAlgo.outputMapImage.ToString() );
Function Examples
auto polystyrene_sep = readVipImage( std::string( IMAGEDEVDATA_IMAGES_FOLDER ) + "polystyrene_sep.vip" ); auto result = distanceMap2d( polystyrene_sep, DistanceMap2d::MappingMode::INSIDE, DistanceMap2d::BorderCondition::MIRROR, 1, 1.4142135623730951, DistanceMap2d::OutputType::SIGNED_INTEGER_16_BIT ); std::cout << "outputMapImage:" << result->toString();
polystyrene_sep = imagedev.read_vip_image(imagedev_data.get_image_path("polystyrene_sep.vip"))
result = imagedev.distance_map_2d( polystyrene_sep, imagedev.DistanceMap2d.INSIDE, imagedev.DistanceMap2d.MIRROR, 1, 1.4142135623730951, imagedev.DistanceMap2d.SIGNED_INTEGER_16_BIT )
print( "output_map_image:", str( result ) );
ImageView polystyrene_sep = Data.ReadVipImage( @"Data/images/polystyrene_sep.vip" ); IOLink.ImageView result = Processing.DistanceMap2d( polystyrene_sep, DistanceMap2d.MappingMode.INSIDE, DistanceMap2d.BorderCondition.MIRROR, 1, 1.4142135623730951, DistanceMap2d.OutputType.SIGNED_INTEGER_16_BIT ); Console.WriteLine( "outputMapImage:" + result.ToString() );