Segment
Contains geometric measurements based on a polygonal approximation of the 2D object boundaries.
More information about the segment objects is available in the polygonal approximation section.
Note: These measurements ignore the intensity input image.
More information about the segment objects is available in the polygonal approximation section.
Note: These measurements ignore the intensity input image.
Object members
| Measurement name | Description | Element type | Indexing |
|---|---|---|---|
| PolygoneArea2d | The area computed from the vectorized edges of the object, expressed in the image calibration unit.
The vectorized edges are extracted by polygonal approximation. |
Floating point | [label] |
| PolygonePerimeter2d | The perimeter computed as the vectorized edges length of the object, expressed in the image calibration unit.
The vectorized edges are extracted by polygonal approximation. |
Floating point | [label] |
| ConvexArea2d | The area of the vectorized edges convex hull of the object, expressed in the image calibration unit.
The vectorized edges are extracted by polygonal approximation. |
Floating point | [label] |
| ConvexPerimeter2d | The perimeter of the vectorized edges convex hull of the object, expressed in the image calibration unit.
The vectorized edges are extracted by polygonal approximation. |
Floating point | [label] |
| SmoothCircleDifference2d | The difference between the object area and the area of its smoothing circle, expressed in the image calibration unit.
The Smooth Circle Difference Area $SCDA$ is given from the object area $A$ and the area of its smoothing circle $SCA$ by: $$ SCDA = \cup(A,SCA) - \cap(A,SCA)$$ The smoothing circle is computed on the polygonal approximation of the object boundary and verifies:
|
Floating point | [label] |
| EnclosingCircleDifference2d | The difference between the object area and the area of its enclosing circle, expressed in the image calibration unit.
The Enclosing Circle Difference Area $ECDA$ is given from the object area $A$ and the area of its enclosing circle $ECA$ by: $$ ECDA = \cup(A,ECA) - \cap(A,ECA)$$ The enclosing ellipse is computed on the polygonal approximation of the object boundary and verifies:
|
Floating point | [label] |
| EnclosingEllipseDifference2d | The difference between the object area and the area of its enclosing ellipse, expressed in the image calibration unit.
The Ellipse Difference Area $EEDA$ is given from the object area $A$ and the area of its enclosing ellipse $EEA$ by: $$ EEDA = \cup(A,EEA) - \cap(A,EEA)$$ The enclosing ellipse is computed on the polygonal approximation of the object boundary and verifies:
|
Floating point | [label] |
| RectangleCenterX2d | The X coordinate of the Rectangle of Minimum Area center, expressed in the coordinate system defined by the image calibration.
The Rectangle of Minimum Area is the rectangle of minimum area enclosing the object polygonal approximation. |
Floating point | [label] |
| RectangleCenterY2d | The Y coordinate of the Rectangle of Minimum Area center, expressed in the coordinate system defined by the image calibration.
The Rectangle of Minimum Area is the rectangle of minimum area enclosing the object polygonal approximation. |
Floating point | [label] |
| RectangleLength2d | The length of the Rectangle of Minimum Area, expressed in the image calibration unit.
The Rectangle of Minimum Area is the rectangle of minimum area enclosing the object polygonal approximation. |
Floating point | [label] |
| RectangleWidth2d | The width of the Rectangle of Minimum Area, expressed in the image calibration unit.
The Rectangle of Minimum Area is the rectangle of minimum area enclosing the object polygonal approximation. |
Floating point | [label] |
| RectangleOrientation2d | The orientation angle of the Rectangle of Minimum Area, in degrees, in the range [0,180].
The Rectangle of Minimum Area is the rectangle of minimum area enclosing the object polygonal approximation. |
Floating point | [label] |
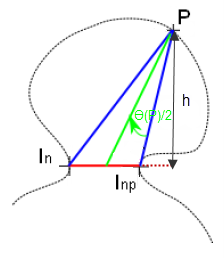
| Rugosity2d | The factor of rugosity determines if the contour of a shape is smooth or not. Its value is close to 1 for an abrasive shape and decreases for smooth boundaries.
Rugosity, also known as 'spike parameter', is given by the formula $Ru(P)=E_{D}(Ru_{d}(P))$ where $E_{D}$ is the mean operator over all the triangle basis $d\in \lbrack 40,L/15 \lbrack$. The step length $d$ represents the distance $\overline{I_{n}I_{np}}$ in figure 1. $L$ is defined as the shape perimeter in pixels. $Ru_{d}(P)$ is defined as follows: $$ Ru_{d}(P) = E_N(ru_{n})$$ where:
|
Floating point | [label] |
| BorderDistance2d | The shortest edge-to-edge distance from the current object to its nearest neighbor, expressed in the image calibration unit.
This distance measurement is computed on the polygonal approximation of the object boundaries. |
Floating point | [label] |
| PolygoneHoleCount2d | The number of holes of the particles represented by the inner and outer chains.
This number is computed on the polygonal approximation of the object boundaries. |
Integer | [label] |
| InsideLength2d | The length of the object skeleton, expressed in the image calibration unit.
This measurement represents the geodesic distance between the two furthest points of the object boundary polygonal approximation. |
Floating point | [label] |
| InsideCenterX2d | The X coordinate of the inside length center, expressed in the coordinate system defined by the image calibration. Unlike the barycenter, this measurement ensures to return a point belonging to the object.
This measurement is extracted from the skeleton of the object boundary polygonal approximation. |
Floating point | [label] |
| InsideCenterY2d | The Y coordinate of the inside length center, expressed in the coordinate system defined by the image calibration. Unlike the barycenter, this measurement ensures to return a point belonging to the object.
This measurement is extracted from the skeleton of the object boundary polygonal approximation. |
Floating point | [label] |