Pore Analysis
This example chains several classical image processing algorithms on a three-dimensional digital rocks image. It extracts several features characterizing the pores contained in shale rock volume.
The input image is a 3D sample of shale rock made up of minerals, organic matter, and pores.
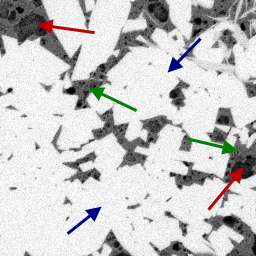
Figure 1. Original image with (red) pores, (green) organic-matter grains, and (blue) minerals
First, this example applies the BilateralFilter3d to denoise the input image while preserving the edges of the different materials.
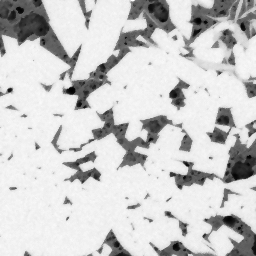
Figure 2. Denoised image
A first thresholding operation is done to isolate the darker objects corresponding to the pores.
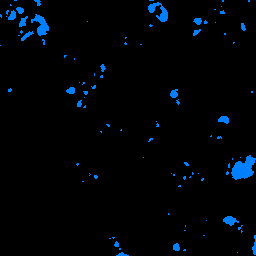
Figure 3. Rough binarization of the pores
An erosion is performed to isolate the pores from the organic matters and build pore markers.
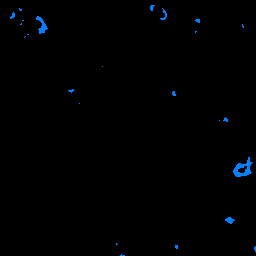
Figure 4. Eroded pore markers
A second thresholding is applied to detect the minerals.

Figure 5. Rough binarization of the minerals
Then, the AddObjectToLabel algorithm is applied to create a label image that merges pore markers as label 1 with background markers as label 2.
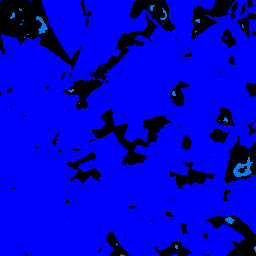
Figure 6. Merged markers: (light blue) pores and (dark blue) organic matters and minerals
The denoised image is processed by the GradientOperator3d algorithm to reveal the edges of the different phases.
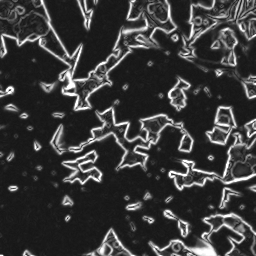
Figure 7. Gradient of the denoised image
This gradient image can be used as a landscape image for the watershed algorithm. MarkerBasedWatershed3d is applied on this image with the merged markers image to detect the separation surfaces between pores and background.
The FillHoles2d algorithm is applied on each 2D slice of the resulting volume to fill the pores. A BorderKill operation is also applied to remove pores that are not entirely visible in the image.
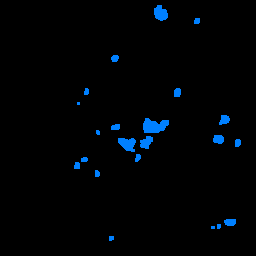
Figure 8. Result after filling pores and rejecting pores intersecting the image borders
The image is labeled to assign the same intensity to all voxels belonging to the same connected pore.
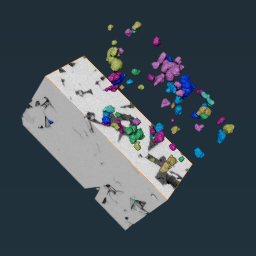
Figure 9. Original image and labeled pores
Some global measurements are computed to extract the number of detected pores and the phase fraction represented by the pores.
Finally, three measurements are computed for each pore: its volume, the diameter of a sphere of the same volume, and a shape factor indicating if the pore is spherical or not. The corresponding results are displayed in the console for the first pores of the volume.
See also
Figure 1. Original image with (red) pores, (green) organic-matter grains, and (blue) minerals
First, this example applies the BilateralFilter3d to denoise the input image while preserving the edges of the different materials.
Figure 2. Denoised image
A first thresholding operation is done to isolate the darker objects corresponding to the pores.
Figure 3. Rough binarization of the pores
An erosion is performed to isolate the pores from the organic matters and build pore markers.
Figure 4. Eroded pore markers
A second thresholding is applied to detect the minerals.
Figure 5. Rough binarization of the minerals
Then, the AddObjectToLabel algorithm is applied to create a label image that merges pore markers as label 1 with background markers as label 2.
Figure 6. Merged markers: (light blue) pores and (dark blue) organic matters and minerals
The denoised image is processed by the GradientOperator3d algorithm to reveal the edges of the different phases.
Figure 7. Gradient of the denoised image
This gradient image can be used as a landscape image for the watershed algorithm. MarkerBasedWatershed3d is applied on this image with the merged markers image to detect the separation surfaces between pores and background.
The FillHoles2d algorithm is applied on each 2D slice of the resulting volume to fill the pores. A BorderKill operation is also applied to remove pores that are not entirely visible in the image.
Figure 8. Result after filling pores and rejecting pores intersecting the image borders
The image is labeled to assign the same intensity to all voxels belonging to the same connected pore.
Figure 9. Original image and labeled pores
Some global measurements are computed to extract the number of detected pores and the phase fraction represented by the pores.
- Pore volume fraction = 1.84%
- Pore number = 114
Finally, three measurements are computed for each pore: its volume, the diameter of a sphere of the same volume, and a shape factor indicating if the pore is spherical or not. The corresponding results are displayed in the console for the first pores of the volume.
| Pore | EquivalentDiameter | Volume3d | InverseSphericity3d |
| 1 | 11.43 | 781.90 | 2.12 |
| 2 | 13.42 | 1266.16 | 1.72 |
| 3 | 6.91 | 172.88 | 1.14 |
| 4 | 9.27 | 558.92 | 1.89 |
#include <ImageDev/ImageDev.h>
#include <ioformat/IOFormat.h>
#include <string.h>
using namespace imagedev;
using namespace ioformat;
using namespace iolink;
int
main( int argc, char* argv[] )
{
int status = 0;
try
{
// Initialize the ImageDev library if not done
if ( imagedev::isInitialized() == false )
imagedev::init();
// Open a standard tif file and display the image properties
auto imageInput = readImage( std::string( IMAGEDEVDATA_IMAGES_FOLDER ) + "shale.am" );
// Preprocess the input with a bilateral filter for denoising
auto imageDenoised = bilateralFilter3d( imageInput, 3, 3, 3, 20, BilateralFilter3d::BILATERAL );
// STEP 1: Pore segmentation with the watershed algorithm
// Threshold the low graylevels (pore markers)
auto imageLowBin =
thresholdingByCriterion( imageDenoised, ThresholdingByCriterion::ComparisonCriterion::LESS_THAN, 40 );
// Slightly erode these markers in order to avoid contact with the high level markers
auto imageLowEro = erosion3d( imageLowBin, 1, Erosion3d::CONNECTIVITY_26 );
// Initialize the marker image (label 1)
auto imageLowLab = convertImage( imageLowEro, ConvertImage::LABEL_16_BIT );
// Threshold the high graylevels (mineral markers)
auto imageHighBin =
thresholdingByCriterion( imageDenoised, ThresholdingByCriterion::ComparisonCriterion::GREATER_THAN, 90 );
// Merge high intensity markers with label 2
auto imageMarkers = addObjectToLabel( imageHighBin, imageLowLab, 2 );
// Extract the gradient to build the relief image for watershed
auto resultGrad = gradientMagnitude3d( imageDenoised,
GradientMagnitude3d::GAUSSIAN,
{ 0.9, 0.9, 0.9 },
GradientMagnitude3d::FilterMode::RECURSIVE,
GradientMagnitude3d::OutputType::SAME_AS_INPUT,
GradientMagnitude3d::GradientMode::AMPLITUDE_EUCLIDEAN );
// Perform the Watershed to detect pore boundaries
auto imageWatershed = markerBasedWatershed3d( resultGrad,
imageMarkers,
MarkerBasedWatershed3d::REPEATABLE,
MarkerBasedWatershed3d::LINES,
MarkerBasedWatershed3d::CONNECTIVITY_26 );
// Fill all pores in each 2D slice of the volume
imageWatershed->setAxesInterpretation( ImageTypeId::IMAGE_SEQUENCE );
auto imageFilled = fillHoles2d( imageWatershed, FillHoles2d::CONNECTIVITY_4 );
imageFilled->setAxesInterpretation( ImageTypeId::VOLUME );
// Remove pores touching the image border
auto imageInside = killBorder3d( imageFilled, KillBorder3d::Neighborhood::CONNECTIVITY_26 );
// Assign labels to the pores
auto imagePores = labeling3d( imageInside, Labeling3d::LABEL_16_BIT, Labeling3d::CONNECTIVITY_26 );
// STEP 2: Pore quantification
// Compute the pore volume percentage
auto poreVolume = intensityIntegral3d( imageInside );
std::cout << " - Pore volume fraction = " << ( 100.0 * poreVolume->volumeFraction() ) << "%" << std::endl;
// Compute the pore number
auto poreCount = objectCount( imagePores );
std::cout << " - Pore number = " << poreCount.outputMeasurement->count( 0 ) << std::endl;
// Define the analysis features to be computed
AnalysisMsr::Ptr analysis = AnalysisMsr::Ptr( new AnalysisMsr() );
auto diameter = analysis->select( NativeMeasurements::equivalentDiameter );
auto volume = analysis->select( NativeMeasurements::volume3d );
auto shape = analysis->select( NativeMeasurements::inverseSphericity3d );
// Launch the feature extraction on the segmented image
labelAnalysis( imagePores, NULL, analysis );
std::cout << "Pore\t" << diameter->name() << "\t" << volume->name() << "\t" << shape->name() << std::endl;
// Print the analysis results for 5% of the pores
for ( int i = 0; i < ( int )( analysis->labelCount() / 20 ); i++ )
{
std::cout << ( i + 1 ) << "\t\t" << diameter->value( i ) << "\t\t\t" << volume->value( i ) << "\t\t"
<< shape->value( i ) << std::endl;
}
// Save the segmented image with IOFormat
writeView( imagePores, "T06_02_output.tif" );
std::cout << "This example ran successfully." << std::endl;
}
catch ( const imagedev::Exception& error )
{
// Print potential exception in the standard output
std::cerr << "ImageDev exception: " << error.what() << std::endl;
status = -1;
}
// ImageDev library finalization
imagedev::finish();
// Check if we must ask for an enter key to close the program
if ( !( ( argc == 2 ) && strcmp( argv[1], "--no-stop-at-end" ) == 0 ) )
std::cout << "Press Enter key to close this window." << std::endl, getchar();
return status;
}
using System;
using ImageDev;
using IOLink;
using IOFormat;
namespace T06_02_PoreAnalysis
{
class Program
{
static void Main(string[] args)
{
int status = 0;
try
{
// Initialize the ImageDev library if not done
if (Initialization.IsInitialized() == false)
Initialization.Init();
// Open a standard tif file and display the image properties
ImageView imageInput = IOFormat.ViewIO.ReadImage("Data/images/shale.am") as ImageView;
// Preprocess the input with a bilateral filter for denoising
ImageView imageDenoised =
Processing.BilateralFilter3d(imageInput, 3, 3, 3, 20, BilateralFilter3d.FilterMode.BILATERAL)
as ImageView;
// STEP 1: Pore segmentation with the watershed algorithm
// Threshold the low graylevels (pore markers)
ImageView imageLowBin = Processing.ThresholdingByCriterion(
imageDenoised, ThresholdingByCriterion.ComparisonCriterion.LESS_THAN, 40) as ImageView;
// Slightly erode these markers in order to avoid contact with the high level markers
ImageView imageLowEro =
Processing.Erosion3d(imageLowBin, 1, Erosion3d.Neighborhood.CONNECTIVITY_26) as ImageView;
// Initialize the marker image (label 1)
ImageView imageLowLab =
Processing.ConvertImage(imageLowEro, ConvertImage.OutputType.LABEL_16_BIT) as ImageView;
// Threshold the high graylevels (mineral markers)
ImageView imageHighBin = Processing.ThresholdingByCriterion(
imageDenoised, ThresholdingByCriterion.ComparisonCriterion.GREATER_THAN, 90) as ImageView;
// Merge high intensity markers with label 2
ImageView imageMarkers = Processing.AddObjectToLabel(imageHighBin, imageLowLab, 2) as ImageView;
// Extract the gradient to build the relief image for watershed
var resultGrad = Processing.GradientMagnitude3d(imageDenoised,
GradientMagnitude3d.GradientOperator.GAUSSIAN,
new double[] { 0.9, 0.9, 0.9 },
GradientMagnitude3d.FilterMode.RECURSIVE,
GradientMagnitude3d.OutputType.SAME_AS_INPUT,
GradientMagnitude3d.GradientMode.AMPLITUDE_EUCLIDEAN);
// Perform the Watershed to detect pore boundaries
ImageView imageWatershed =
Processing.MarkerBasedWatershed3d(resultGrad,
imageMarkers,
MarkerBasedWatershed3d.AlgorithmMode.REPEATABLE,
MarkerBasedWatershed3d.OutputType.LINES,
MarkerBasedWatershed3d.Neighborhood.CONNECTIVITY_26) as ImageView;
// Fill all pores in each 2D slice of the volume
imageWatershed.AxesInterpretation = ImageTypeId.IMAGE_SEQUENCE;
ImageView imageFilled = Processing.FillHoles2d(imageWatershed, FillHoles2d.Neighborhood.CONNECTIVITY_4);
imageFilled.AxesInterpretation = ImageTypeId.VOLUME;
// Remove pores touching the image border
ImageView imageInside =
Processing.KillBorder3d(imageFilled, KillBorder3d.Neighborhood.CONNECTIVITY_26) as ImageView;
// Assign labels to the pores
ImageView imagePores = Processing.Labeling3d(imageInside,
Labeling3d.LabelType.LABEL_16_BIT,
Labeling3d.Neighborhood.CONNECTIVITY_26) as ImageView;
// STEP 2: Pore quantification
// Compute the pore volume percentage
var poreVolume = Processing.IntensityIntegral3d(imageInside);
Console.WriteLine(
" - Pore volume fraction = " + (100.0 * poreVolume.volumeFraction()).ToString("0.00") + " %");
// Compute the pore number
var poreCount = Processing.ObjectCount(imagePores);
Console.WriteLine(" - Pore number = " + poreCount.outputMeasurement.count(0));
// Define the analysis features to be computed
AnalysisMsr analysis = new AnalysisMsr();
var diameter = analysis.Select(NativeMeasurements.EquivalentDiameter);
var volume = analysis.Select(NativeMeasurements.Volume3d);
var shape = analysis.Select(NativeMeasurements.InverseSphericity3d);
// Launch the feature extraction on the segmented image
Processing.LabelAnalysis(imagePores, null, analysis);
Console.WriteLine("Pore\t" + diameter.Name() + "\t" + volume.Name() + "\t" + shape.Name());
// Print the analysis results for 5% of the pores
for (int i = 0; i < (int)(analysis.LabelCount() / 20); i++)
{
Console.WriteLine((i + 1) + "\t\t" + diameter.Value(i).ToString("0.00") + "\t\t\t" +
volume.Value(i).ToString("0.00") + "\t\t" +
shape.Value(i).ToString("0.00"));
}
// Save the segmented image with IOFormat
IOFormat.ViewIO.WriteView(imagePores, "T06_02_output.tif");
}
catch (Exception error)
{
// Print potential exception in the standard output
System.Console.WriteLine("HelloImageDev exception: " + error.ToString());
status = -1;
}
// ImageDev library finalization
Initialization.Finish();
// Check if we must ask for an enter key to close the program
if (!((args.Length >= 1) && (args[0] == "--no-stop-at-end")))
{
System.Console.WriteLine("Press Enter key to close this window.");
System.Console.ReadKey();
}
System.Environment.Exit(status);
}
}
}
import imagedev
import imagedev_data
import ioformat
import iolink
# Open and display a tif file
image_input = ioformat.read_image(imagedev_data.get_image_path("shale.am"))
# Preprocess the input with a bilateral filter for denoising
image_denoised = imagedev.bilateral_filter_3d(image_input)
# STEP 1: Pore segmentation with the watershed algorithm
# Threshold the low graylevels (pore markers)
image_low_bin = imagedev.thresholding_by_criterion(\
image_denoised, imagedev.ThresholdingByCriterion.ComparisonCriterion.LESS_THAN, 40)
# Slightly erode these markers in order to avoid contact with the high level markers
image_low_ero = imagedev.erosion_3d(image_low_bin, 1)
# Initialize the marker image (label 1)
image_low_lab = imagedev.convert_image(image_low_ero, imagedev.ConvertImage.LABEL_16_BIT)
# Threshold the high graylevels (mineral markers)
image_high_bin = imagedev.thresholding_by_criterion(\
image_denoised, imagedev.ThresholdingByCriterion.ComparisonCriterion.GREATER_THAN, 90)
# Merge high intensity markers with label 2
image_markers = imagedev.add_object_to_label(image_high_bin, image_low_lab, 2)
# Extract the gradient to build the relief image for watershed
image_grad = imagedev.gradient_magnitude_3d(image_denoised,
imagedev.GradientMagnitude3d.GAUSSIAN, [0.9, 0.9, 0.9],
imagedev.GradientMagnitude3d.RECURSIVE,
imagedev.GradientMagnitude3d.SAME_AS_INPUT,
imagedev.GradientMagnitude3d.AMPLITUDE_EUCLIDEAN)
# Perform the Watershed to detect pore boundaries
image_watershed = imagedev.marker_based_watershed_3d(image_grad, image_markers,\
output_type=imagedev.MarkerBasedWatershed3d.OutputType.LINES)
# Fill all pores in each slice of the volume
image_watershed.axes_interpretation = iolink.ImageTypeId.IMAGE_SEQUENCE
image_filled = imagedev.fill_holes_2d(image_watershed, imagedev.FillHoles2d.CONNECTIVITY_4)
image_filled.axes_interpretation = iolink.ImageTypeId.VOLUME
# Remove pores touching the image border
image_inside = imagedev.kill_border_3d(image_filled)
# Assign labels to the pores
image_pores = imagedev.labeling_3d(image_inside)
# STEP 2: Pore quantification
# Compute the pore volume percentage
pore_volume = imagedev.intensity_integral_3d(image_inside)
print(" - Pore volume fraction = " + "{:.2f}".format(pore_volume.volume_fraction()*100) + "%")
# Compute the pore number
_, pore_count = imagedev.object_count(image_pores)
print(" - Pore number = " + str(pore_count.count(0)))
# Define the analysis features to be computed
analysis = imagedev.AnalysisMsr()
diameter = analysis.select(imagedev.native_measurements.EquivalentDiameter)
volume = analysis.select(imagedev.native_measurements.Volume3d)
shape = analysis.select(imagedev.native_measurements.InverseSphericity3d)
# Launch the feature extraction on the segmented image
imagedev.label_analysis(image_pores, None, analysis)
print("Pore\t" + diameter.name + "\t" + volume.name + "\t" + shape.name)
# Print the analysis results for 5% of the pores
for i in range(int(analysis.label_count/20)):
print(str(i+1) + '\t\t\t' + "{:.2f}".format(diameter.value(i)) +'\t\t\t\t' + "{:.2f}".format(volume.value(i)) +\
'\t\t' + "{:.2f}".format(shape.value(i)))
# Save the segmented image with IOFormat
ioformat.write_view(image_pores, "T06_02_output.tif") See also
© 2026 Thermo Fisher Scientific Inc. All rights reserved.