BeamHardeningCorrection3d
Performs a beam hardening correction dedicated to cylindrical objects of a Computed Tomography volume.
Access to parameter description
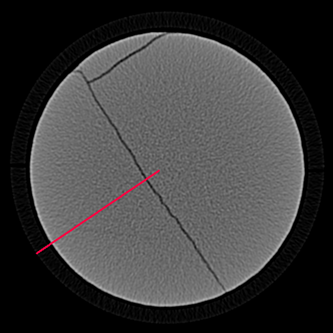
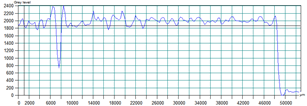
This algorithm performs a simple correction for beam hardening that mainly works for homogeneous cylindrical objects. Beam hardening manifests by a radial increase of the attenuation coefficient when the X-ray beam crosses a material interface presenting a high density difference. On cylindrical material samples, like geological cores, it is materialized by an intensity peak on the cylinder border.
First, an average cylindrical intensity profile $P$ is computed around a user-defined rotation axis. Theoretically, this axis must correspond to the CT rotation axis, but it does not necessarily need to be aligned with one of the input image axis.
This profile can be smoothed with a gaussian filter, and is then normalized by the mean intensity value of the inner part of the cylindrical object.
Finally, all intensities are divided by this smoothed profile to perform a radial averaging.
The corrected value $O$ of a voxel $v$ of the input image $I$ is given by: $$ O(v) = \frac {I(v)}{P(r)}\times\mu_c$$ where $P$ is the cylindrical profile intensity, $r$ is the distance from the correction center to $v$ and $\mu_c$ the normalization factor (inner part mean intensity).
To focus the correction on phases of interest, two thresholds are proposed to
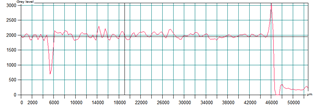
Figure 1. (a) Original CT image with beam hardening and line profile from image
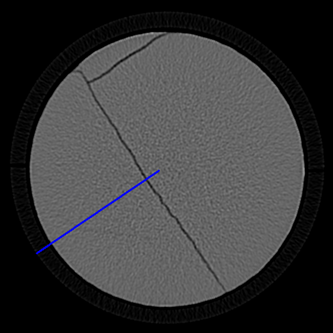
center (left of the curve) to exterior (right). (b) Corrected image with ring artifact removal filter.
See also
Access to parameter description
This algorithm performs a simple correction for beam hardening that mainly works for homogeneous cylindrical objects. Beam hardening manifests by a radial increase of the attenuation coefficient when the X-ray beam crosses a material interface presenting a high density difference. On cylindrical material samples, like geological cores, it is materialized by an intensity peak on the cylinder border.
First, an average cylindrical intensity profile $P$ is computed around a user-defined rotation axis. Theoretically, this axis must correspond to the CT rotation axis, but it does not necessarily need to be aligned with one of the input image axis.
This profile can be smoothed with a gaussian filter, and is then normalized by the mean intensity value of the inner part of the cylindrical object.
Finally, all intensities are divided by this smoothed profile to perform a radial averaging.
The corrected value $O$ of a voxel $v$ of the input image $I$ is given by: $$ O(v) = \frac {I(v)}{P(r)}\times\mu_c$$ where $P$ is the cylindrical profile intensity, $r$ is the distance from the correction center to $v$ and $\mu_c$ the normalization factor (inner part mean intensity).
To focus the correction on phases of interest, two thresholds are proposed to
- Retain only values inside the threshold range for the cylindrical profile extraction.
- Apply the correction only on voxel intensities belonging to this range.
 |
 |
 (a) |
 (b) |
center (left of the curve) to exterior (right). (b) Corrected image with ring artifact removal filter.
See also
Function Syntax
This function returns outputImage.
// Function prototype
std::shared_ptr< iolink::ImageView > beamHardeningCorrection3d( std::shared_ptr< iolink::ImageView > inputImage, BeamHardeningCorrection3d::AxisDirection axisDirection, BeamHardeningCorrection3d::AxisOrientation axisOrientation, BeamHardeningCorrection3d::CenterMode centerMode, iolink::Vector3u32 mainCenter, iolink::Vector3u32 secondaryCenter, double radiusPercentage, iolink::Vector2u32 radiusRange, iolink::Vector2d thresholdRange, double standardDeviation, BeamHardeningCorrection3d::PaddingPolicy paddingPolicy, double paddingValue, std::shared_ptr< iolink::ImageView > outputImage = NULL );
This function returns outputImage.
// Function prototype.
beam_hardening_correction_3d( input_image,
axis_direction = BeamHardeningCorrection3d.AxisDirection.Z_AXIS,
axis_orientation = BeamHardeningCorrection3d.AxisOrientation.STRAIGHT,
center_mode = BeamHardeningCorrection3d.CenterMode.IMAGE_CENTER,
main_center = [0, 0, 0],
secondary_center = [0, 0, 0],
radius_percentage = 25,
radius_range = [0, 0],
threshold_range = [0, 65535],
standard_deviation = 0,
padding_policy = BeamHardeningCorrection3d.PaddingPolicy.INPUT_VALUE,
padding_value = 0,
output_image = None )
This function returns outputImage.
// Function prototype.
public static IOLink.ImageView
BeamHardeningCorrection3d( IOLink.ImageView inputImage,
BeamHardeningCorrection3d.AxisDirection axisDirection = ImageDev.BeamHardeningCorrection3d.AxisDirection.Z_AXIS,
BeamHardeningCorrection3d.AxisOrientation axisOrientation = ImageDev.BeamHardeningCorrection3d.AxisOrientation.STRAIGHT,
BeamHardeningCorrection3d.CenterMode centerMode = ImageDev.BeamHardeningCorrection3d.CenterMode.IMAGE_CENTER,
uint[] mainCenter = null,
uint[] secondaryCenter = null,
double radiusPercentage = 25,
uint[] radiusRange = null,
double[] thresholdRange = null,
double standardDeviation = 0,
BeamHardeningCorrection3d.PaddingPolicy paddingPolicy = ImageDev.BeamHardeningCorrection3d.PaddingPolicy.INPUT_VALUE,
double paddingValue = 0,
IOLink.ImageView outputImage = null );
Class Syntax
Parameters
| Parameter Name | Description | Type | Supported Values | Default Value | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
 |
inputImage |
The 3D input image to correct. | Image | Grayscale or Multispectral | nullptr | ||||||
|
axisDirection |
The axis along which the correction has to be carried out.
|
Enumeration | Z_AXIS | |||||||
|
axisOrientation |
Set the cylinder axis to be used during correction: straight or sheared. This option is ignored if the axis direction is not Z_AXIS (forced to straight).
|
Enumeration | STRAIGHT | |||||||
|
centerMode |
The way to define the main center of the cylindrical sample. It is ignored if the axis orientation is set to SHEARED (forced to OTHER).
|
Enumeration | IMAGE_CENTER | |||||||
|
mainCenter |
The midpoint of the sample in voxel coordinates.
With straight axis setting, this point is considered as the center of the sample. With sheared axis setting, it is considered as the center of the first plane of the sample. It is ignored if the axis orientation is set to STRAIGHT and center mode to IMAGE_CENTER. |
Vector3u32 | Any value | {0, 0, 0} | ||||||
|
secondaryCenter |
The midpoint of the last plane of the sample in voxel coordinates (ignored with STRAIGHT axis setting).
It is only used if axis direction is Z_AXIS and the orientation is set to SHEARED. |
Vector3u32 | Any value | {0, 0, 0} | ||||||
|
radiusPercentage |
The portion, in percent, of the maximum radius that is effectively considered for computing the normalization factor. The average value of the area inside this percentage of the maximum radius is used to normalize the data. | Float64 | [0, 100] | 25 | ||||||
|
radiusRange |
The minimum and maximum radius, in voxel units, between which the correction is done. If the maximum radius is equal to 0, the largest possible radius is used. | Vector2u32 | Any value | {0, 0} | ||||||
|
thresholdRange |
Values out of this range are not included in the statistics to calculate the correction. | Vector2d | Any value | {0.f, 65535.f} | ||||||
|
standardDeviation |
The standard deviation, in voxel units, of the gaussian filtering used to smooth the histogram before performing the correction. No smoothing is applied if this value is set to 0. | Float64 | >=0 | 0 | ||||||
|
paddingPolicy |
The way to manage uncomputed values (that is, voxels that are out of the maximum radius).
|
Enumeration | INPUT_VALUE | |||||||
|
paddingValue |
The intensity value used to fill uncomputed voxels (that is, voxels that are out of the maximum radius). It is used only with the fixed value padding policy. | Float64 | Any value | 0 | ||||||
 |
outputImage |
The corrected image. Its dimensions and type are forced to the same values as the input. | Image | nullptr | |||||||
| Parameter Name | Description | Type | Supported Values | Default Value | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
|
input_image |
The 3D input image to correct. | image | Grayscale or Multispectral | None | ||||||
|
axis_direction |
The axis along which the correction has to be carried out.
|
enumeration | Z_AXIS | |||||||
|
axis_orientation |
Set the cylinder axis to be used during correction: straight or sheared. This option is ignored if the axis direction is not Z_AXIS (forced to straight).
|
enumeration | STRAIGHT | |||||||
|
center_mode |
The way to define the main center of the cylindrical sample. It is ignored if the axis orientation is set to SHEARED (forced to OTHER).
|
enumeration | IMAGE_CENTER | |||||||
|
main_center |
The midpoint of the sample in voxel coordinates.
With straight axis setting, this point is considered as the center of the sample. With sheared axis setting, it is considered as the center of the first plane of the sample. It is ignored if the axis orientation is set to STRAIGHT and center mode to IMAGE_CENTER. |
vector3u32 | Any value | [0, 0, 0] | ||||||
|
secondary_center |
The midpoint of the last plane of the sample in voxel coordinates (ignored with STRAIGHT axis setting).
It is only used if axis direction is Z_AXIS and the orientation is set to SHEARED. |
vector3u32 | Any value | [0, 0, 0] | ||||||
|
radius_percentage |
The portion, in percent, of the maximum radius that is effectively considered for computing the normalization factor. The average value of the area inside this percentage of the maximum radius is used to normalize the data. | float64 | [0, 100] | 25 | ||||||
|
radius_range |
The minimum and maximum radius, in voxel units, between which the correction is done. If the maximum radius is equal to 0, the largest possible radius is used. | vector2u32 | Any value | [0, 0] | ||||||
|
threshold_range |
Values out of this range are not included in the statistics to calculate the correction. | vector2d | Any value | [0, 65535] | ||||||
|
standard_deviation |
The standard deviation, in voxel units, of the gaussian filtering used to smooth the histogram before performing the correction. No smoothing is applied if this value is set to 0. | float64 | >=0 | 0 | ||||||
|
padding_policy |
The way to manage uncomputed values (that is, voxels that are out of the maximum radius).
|
enumeration | INPUT_VALUE | |||||||
|
padding_value |
The intensity value used to fill uncomputed voxels (that is, voxels that are out of the maximum radius). It is used only with the fixed value padding policy. | float64 | Any value | 0 | ||||||
|
output_image |
The corrected image. Its dimensions and type are forced to the same values as the input. | image | None | |||||||
| Parameter Name | Description | Type | Supported Values | Default Value | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
|
inputImage |
The 3D input image to correct. | Image | Grayscale or Multispectral | null | ||||||
|
axisDirection |
The axis along which the correction has to be carried out.
|
Enumeration | Z_AXIS | |||||||
|
axisOrientation |
Set the cylinder axis to be used during correction: straight or sheared. This option is ignored if the axis direction is not Z_AXIS (forced to straight).
|
Enumeration | STRAIGHT | |||||||
|
centerMode |
The way to define the main center of the cylindrical sample. It is ignored if the axis orientation is set to SHEARED (forced to OTHER).
|
Enumeration | IMAGE_CENTER | |||||||
|
mainCenter |
The midpoint of the sample in voxel coordinates.
With straight axis setting, this point is considered as the center of the sample. With sheared axis setting, it is considered as the center of the first plane of the sample. It is ignored if the axis orientation is set to STRAIGHT and center mode to IMAGE_CENTER. |
Vector3u32 | Any value | {0, 0, 0} | ||||||
|
secondaryCenter |
The midpoint of the last plane of the sample in voxel coordinates (ignored with STRAIGHT axis setting).
It is only used if axis direction is Z_AXIS and the orientation is set to SHEARED. |
Vector3u32 | Any value | {0, 0, 0} | ||||||
|
radiusPercentage |
The portion, in percent, of the maximum radius that is effectively considered for computing the normalization factor. The average value of the area inside this percentage of the maximum radius is used to normalize the data. | Float64 | [0, 100] | 25 | ||||||
|
radiusRange |
The minimum and maximum radius, in voxel units, between which the correction is done. If the maximum radius is equal to 0, the largest possible radius is used. | Vector2u32 | Any value | {0, 0} | ||||||
|
thresholdRange |
Values out of this range are not included in the statistics to calculate the correction. | Vector2d | Any value | {0f, 65535f} | ||||||
|
standardDeviation |
The standard deviation, in voxel units, of the gaussian filtering used to smooth the histogram before performing the correction. No smoothing is applied if this value is set to 0. | Float64 | >=0 | 0 | ||||||
|
paddingPolicy |
The way to manage uncomputed values (that is, voxels that are out of the maximum radius).
|
Enumeration | INPUT_VALUE | |||||||
|
paddingValue |
The intensity value used to fill uncomputed voxels (that is, voxels that are out of the maximum radius). It is used only with the fixed value padding policy. | Float64 | Any value | 0 | ||||||
|
outputImage |
The corrected image. Its dimensions and type are forced to the same values as the input. | Image | null | |||||||
Object Examples
auto foam = readVipImage( std::string( IMAGEDEVDATA_IMAGES_FOLDER ) + "foam.vip" );
BeamHardeningCorrection3d beamHardeningCorrection3dAlgo;
beamHardeningCorrection3dAlgo.setInputImage( foam );
beamHardeningCorrection3dAlgo.setAxisDirection( BeamHardeningCorrection3d::AxisDirection::Z_AXIS );
beamHardeningCorrection3dAlgo.setAxisOrientation( BeamHardeningCorrection3d::AxisOrientation::STRAIGHT );
beamHardeningCorrection3dAlgo.setCenterMode( BeamHardeningCorrection3d::CenterMode::OTHER );
beamHardeningCorrection3dAlgo.setMainCenter( {40, 50, 0} );
beamHardeningCorrection3dAlgo.setSecondaryCenter( {0, 0, 0} );
beamHardeningCorrection3dAlgo.setRadiusPercentage( 25 );
beamHardeningCorrection3dAlgo.setRadiusRange( {0, 80} );
beamHardeningCorrection3dAlgo.setThresholdRange( {0, 255} );
beamHardeningCorrection3dAlgo.setStandardDeviation( 4 );
beamHardeningCorrection3dAlgo.setPaddingPolicy( BeamHardeningCorrection3d::PaddingPolicy::INPUT_VALUE );
beamHardeningCorrection3dAlgo.setPaddingValue( 0 );
beamHardeningCorrection3dAlgo.execute();
std::cout << "outputImage:" << beamHardeningCorrection3dAlgo.outputImage()->toString();
foam = imagedev.read_vip_image(imagedev_data.get_image_path("foam.vip"))
beam_hardening_correction_3d_algo = imagedev.BeamHardeningCorrection3d()
beam_hardening_correction_3d_algo.input_image = foam
beam_hardening_correction_3d_algo.axis_direction = imagedev.BeamHardeningCorrection3d.Z_AXIS
beam_hardening_correction_3d_algo.axis_orientation = imagedev.BeamHardeningCorrection3d.STRAIGHT
beam_hardening_correction_3d_algo.center_mode = imagedev.BeamHardeningCorrection3d.OTHER
beam_hardening_correction_3d_algo.main_center = [40, 50, 0]
beam_hardening_correction_3d_algo.secondary_center = [0, 0, 0]
beam_hardening_correction_3d_algo.radius_percentage = 25
beam_hardening_correction_3d_algo.radius_range = [0, 80]
beam_hardening_correction_3d_algo.threshold_range = [0, 255]
beam_hardening_correction_3d_algo.standard_deviation = 4
beam_hardening_correction_3d_algo.padding_policy = imagedev.BeamHardeningCorrection3d.INPUT_VALUE
beam_hardening_correction_3d_algo.padding_value = 0
beam_hardening_correction_3d_algo.execute()
print( "output_image:", str( beam_hardening_correction_3d_algo.output_image ) )
ImageView foam = Data.ReadVipImage( @"Data/images/foam.vip" );
BeamHardeningCorrection3d beamHardeningCorrection3dAlgo = new BeamHardeningCorrection3d
{
inputImage = foam,
axisDirection = BeamHardeningCorrection3d.AxisDirection.Z_AXIS,
axisOrientation = BeamHardeningCorrection3d.AxisOrientation.STRAIGHT,
centerMode = BeamHardeningCorrection3d.CenterMode.OTHER,
mainCenter = new uint[]{40, 50, 0},
secondaryCenter = new uint[]{0, 0, 0},
radiusPercentage = 25,
radiusRange = new uint[]{0, 80},
thresholdRange = new double[]{0, 255},
standardDeviation = 4,
paddingPolicy = BeamHardeningCorrection3d.PaddingPolicy.INPUT_VALUE,
paddingValue = 0
};
beamHardeningCorrection3dAlgo.Execute();
Console.WriteLine( "outputImage:" + beamHardeningCorrection3dAlgo.outputImage.ToString() );
Function Examples
auto foam = readVipImage( std::string( IMAGEDEVDATA_IMAGES_FOLDER ) + "foam.vip" );
auto result = beamHardeningCorrection3d( foam, BeamHardeningCorrection3d::AxisDirection::Z_AXIS, BeamHardeningCorrection3d::AxisOrientation::STRAIGHT, BeamHardeningCorrection3d::CenterMode::OTHER, {40, 50, 0}, {0, 0, 0}, 25, {0, 80}, {0, 255}, 4, BeamHardeningCorrection3d::PaddingPolicy::INPUT_VALUE, 0 );
std::cout << "outputImage:" << result->toString();
foam = imagedev.read_vip_image(imagedev_data.get_image_path("foam.vip"))
result = imagedev.beam_hardening_correction_3d( foam, imagedev.BeamHardeningCorrection3d.Z_AXIS, imagedev.BeamHardeningCorrection3d.STRAIGHT, imagedev.BeamHardeningCorrection3d.OTHER, [40, 50, 0], [0, 0, 0], 25, [0, 80], [0, 255], 4, imagedev.BeamHardeningCorrection3d.INPUT_VALUE, 0 )
print( "output_image:", str( result ) )
ImageView foam = Data.ReadVipImage( @"Data/images/foam.vip" );
IOLink.ImageView result = Processing.BeamHardeningCorrection3d( foam, BeamHardeningCorrection3d.AxisDirection.Z_AXIS, BeamHardeningCorrection3d.AxisOrientation.STRAIGHT, BeamHardeningCorrection3d.CenterMode.OTHER, new uint[]{40, 50, 0}, new uint[]{0, 0, 0}, 25, new uint[]{0, 80}, new double[]{0, 255}, 4, BeamHardeningCorrection3d.PaddingPolicy.INPUT_VALUE, 0 );
Console.WriteLine( "outputImage:" + result.ToString() );