Registration
This group provides image registration algorithms.
- ImagePrealignment3d: Estimates a transformation (translation and rotation) that roughly aligns a moving image with a fixed image based on their intensity values.
- AffineRegistration: Computes the best transformation for the co-registration of two images, using an iterative optimization algorithm.
- ElasticRegistration2d: Computes the optimal elastic transformation to register a two-dimensional a moving image onto a fixed image.
Spatial registration is about aligning or overlaying two or more data sets into the same coordinate system.
In registration, typically one of the data sets is taken as the reference, and the other one is transformed,
(moved and possibly rescaled) until both data sets match.
Registered data can be produced by different sensors, at different times, from different object regions, or from different specimens or models.
Image registration methods can be manual, automatic, or semi-automatic.
Closely related to registration is the task of data fusion (the simultaneous visualization of registered data sets) or combination into derivative data.
The goal of registration is to find a transformation aligning a moving image, with a fixed image, starting from an initial transformation and by optimizing a similarity criterion between both images.
The different registration algorithms depend on the type of transformation that is applied on the moving image to be aligned with the fixed image. Two types of transformations are commonly distinguished:
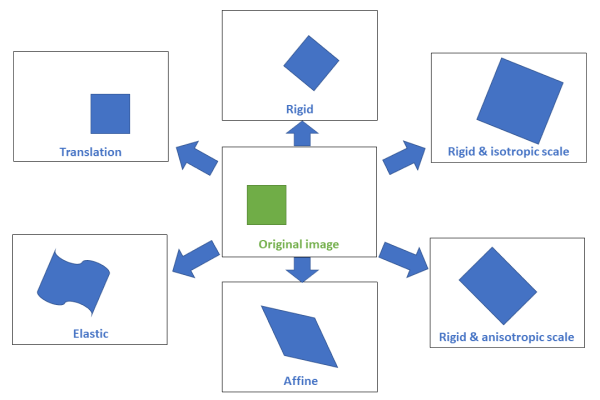
Figure 1. Different types of transformations
Registered data can be produced by different sensors, at different times, from different object regions, or from different specimens or models.
Image registration methods can be manual, automatic, or semi-automatic.
Closely related to registration is the task of data fusion (the simultaneous visualization of registered data sets) or combination into derivative data.
The goal of registration is to find a transformation aligning a moving image, with a fixed image, starting from an initial transformation and by optimizing a similarity criterion between both images.
The different registration algorithms depend on the type of transformation that is applied on the moving image to be aligned with the fixed image. Two types of transformations are commonly distinguished:
- The linear transformations which can be a single translation, rigid (translation and rotation only), rigid with scale factors (isotropic or anisotropic along axis directions) or affine (including shear transformation). These transformations can be modelized by a matrix globally applicable to the moving image.
- The elastic or non-rigid transformations for which each image element is independently moved. This category of transformation is generally modelized by a displacement field, representing the displacement vector to apply on each pixel of the moving image to align it with the fixed image.
Figure 1. Different types of transformations